publications
Shingo Kitagawa's publications
Journal Articles
2025
2023

2021

2020
Conference Articles
2023
2022


2020
-
 Development and Evaluation of Mixed Reality Co-eating System: Sharing Behavior of Eating Food with a Robot Could Improve Our Dining ExperienceIn Proceedings of The 29th IEEE International Conference on Robot & Human Interactive Communication, Sep 2020
Development and Evaluation of Mixed Reality Co-eating System: Sharing Behavior of Eating Food with a Robot Could Improve Our Dining ExperienceIn Proceedings of The 29th IEEE International Conference on Robot & Human Interactive Communication, Sep 2020
2019
-
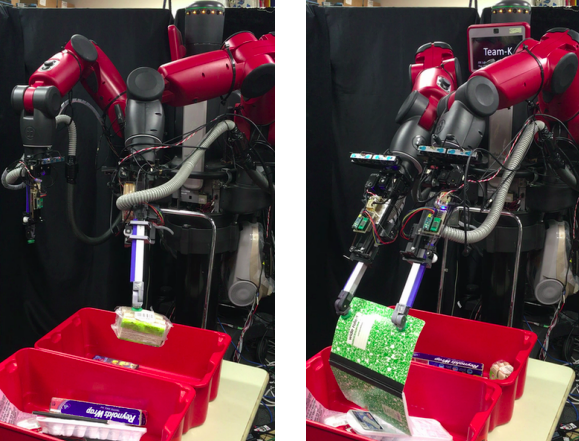
 Learning-Based Task Failure Prediction for Selective Dual-Arm Manipulation in Warehouse StowingIn Intelligent Autonomous Systems 15, May 2019
Learning-Based Task Failure Prediction for Selective Dual-Arm Manipulation in Warehouse StowingIn Intelligent Autonomous Systems 15, May 2019
2018
-
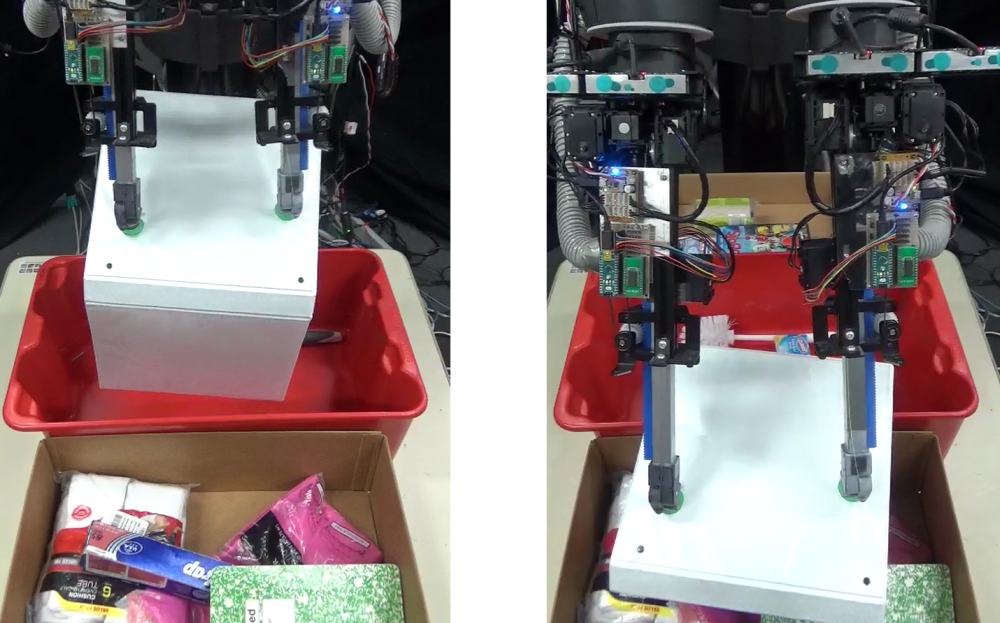
 Multi-stage Learning of Selective Dual-arm Grasping Based on Obtaining and Pruning Grasping Points Through the Robot Experience in the Real WorldIn Proceedings of The 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct 2018
Multi-stage Learning of Selective Dual-arm Grasping Based on Obtaining and Pruning Grasping Points Through the Robot Experience in the Real WorldIn Proceedings of The 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct 2018 -
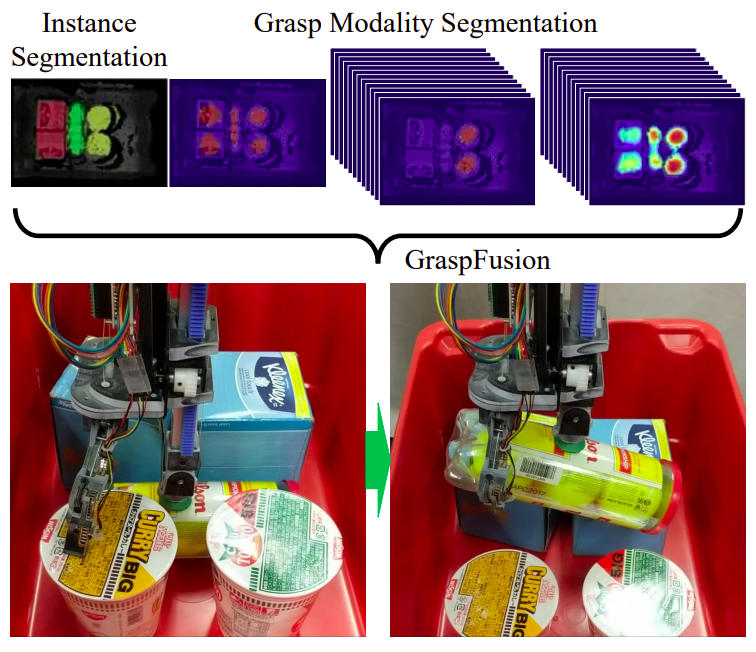
 Instance Segmentation of Visible and Occluded Regions for Finding and Picking Target from a Pile of ObjectsIn Proceedings of The 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct 2018
Instance Segmentation of Visible and Occluded Regions for Finding and Picking Target from a Pile of ObjectsIn Proceedings of The 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct 2018
Presentation
2021
- A novel user interface for dual-arm telemanipulationApr 2021
- Robot dual-arm telemanipulation: User interface and real-world systemMar 2021